比较分辨率、帧率和接口等基本相机规格很容易。比较相机的成像性能,如时间暗噪声,量子效率和饱和容量可能是具有挑战性的。理解这些不同的测量值的真正含义是很重要的.
信噪比与动态范围有何不同?什么是量子效率?它是在峰值还是在特定波长测量的?本文将探讨这些问题,并解释如何根据EMVA1288标准的成像性能数据来比较和选择相机。
EMVA1288是一个标准,它定义了要测量的相机性能特征,如何测量它们,以及如何以统一的方式呈现结果。本文的第一部分将有助于理解成像传感器成像性能的不同方面。
在考虑图像传感器如何将光转换为数字图像并最终定义传感器性能时,理解这些基本概念是至关重要的,将在下面讨论。图1显示了单个像素并突出显示了这些概念。
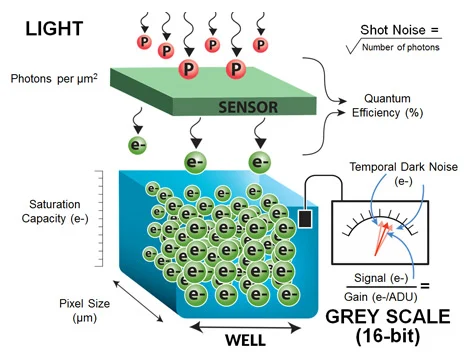
图1所示。图片来源:FLIR系统
首先要了解的是光本身固有的噪声。光是由被称为光子的离散粒子组成的,它们是由光源产生的。yabo214当光源随机地产生光子时,光的感知强度就会产生噪声。
光物理学表明,在光强中观察到的噪声等于光源产生的光子数的平方根。这种类型的噪音被称为散弹噪音。
值得考虑的是,一个像素所看到的光子数量将取决于光强度和曝光时间。这篇文章将考察光强和曝光时间组合的光子数。
同样,由于建立光敏面积必须平方,Pixel Size对传感器的光采集能力有非线性影响。把光子转换成电子是光数字化的第一步。
本文没有解释传感器是如何做到这一点的,但它提出了转换效率的衡量。
量子效率(QE)是数字化过程中产生的电子与光子的比率。当6个光子“落”在传感器上时产生3个电子,图1中的示例传感器的QE为50%。
电子在被数字化之前被存储在像素中。这就是所谓的井。能够储存在井内的电子数称为井深或饱和容量。如果阱接收的电子超过饱和容量,则不会存储额外的电子。
一旦像素完成光收集,就测量井中的电荷,这种测量被称为信号。图1中信号的测量用一个箭头标尺表示。与此测量相关的错误被称为读噪声或时间暗噪声。
最后,通过将以电子表示的信号值转换为16位模拟数字单元(ADU)像素值来建立灰度。模拟信号值与数字灰度值之间的比率是用每ADU的电子来测量的,称为增益。
“模拟到数字”转换过程的增益不应与EMVA1288标准定义的增益参数混淆。在评估相机的性能时,通常会参考动态范围和信噪比。
这两个衡量相机性能的指标都考虑了相机所看到的噪声与信号的比率。信噪比包括散粒噪声和时间暗噪声的均方根(RMS)之和,而动态范围只考虑时间暗噪声。
要得到与传感器观测到的噪声相等的信号所需要的光子数被称为绝对灵敏度阈值。因为它代表了观测任何有意义的信号所需的理论上的最小光量,这是一个至关重要的指标。
FLIR对70多种相机型号的成像性能进行了业界首创的全面研究,以帮助比较基于EMVA1288标准的传感器和相机。
表1。来源:FLIR系统
| 测量 |
定义 |
受 |
单位 |
| 散粒噪声 |
信号的平方根 |
由光的性质引起 |
e - |
| 像素大小 |
像素大小… |
传感器设计 |
µm |
| 量子效率 |
光子转换为电子的百分比
在特定波长 |
传感器设计 |
% |
时间
黑暗的噪音
(噪音) |
没有信号时,传感器内有噪音 |
传感器和摄像头设计 |
e - |
饱和容量
(深度) |
一个像素所能容纳的电荷量 |
传感器和摄像头设计 |
e - |
最大信号
噪比 |
一个信号与包含在该信号中的所有噪声的可能的最高比率,包括散粒噪声和时间暗噪声。 |
传感器和摄像头设计 |
dB,位 |
| 动态范围 |
信噪比,仅包括时间暗噪声 |
传感器和摄像头设计 |
dB,位 |
绝对灵敏度
阈值 |
产生信号所需的光子数量
等于噪音 |
传感器和摄像头设计 |
Ƴ |
| 获得 |
参数,表示变化的大小
需要有电子才能观察到内部的变化
16位ADUs(俗称灰度) |
传感器和摄像头设计 |
e - /
ADU |
相机的弱光性能比较
本文将考虑光学字符识别(OCR)和车牌识别(LPR)等应用,这些应用通常使用单色成像,而由于曝光时间短,相机能收集到的光量可能受到限制。
确定解决成像问题所需的分辨率、帧率和视场非常简单,但决定相机是否具有足够的成像性能则更具挑战性。
这个挑战通常是通过尝试和错误来解决的。在一个视觉系统设计师建立的例子中VGA摄像头在应用程序中,¼" CCD以30帧/秒的速度运行是足够的,最初的测试可能表明,当物体静止时,相机在10毫秒的曝光时间有足够的灵敏度。
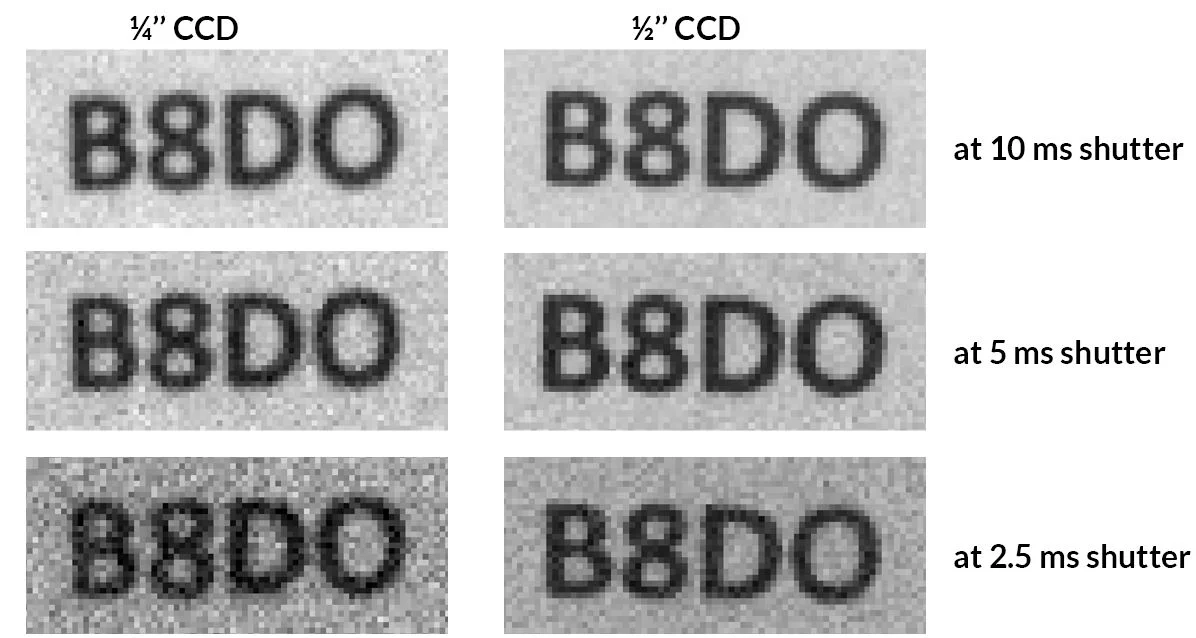
图2。1/4”和1/2”CCD相机在不同曝光时间下得到的结果。图片来源:FLIR系统
图2展示了一个简单的例子,其中包含字符B、8、D和0,这些字符很容易被视觉算法混淆。左上角的图像由¼“CCD相机拍摄,生成适合图像处理的图像。
然而,当物体开始移动时,曝光时间必须减少,因为相机不能提供有用的信息。这是因为数字“8”和“0”不能与字母“B”和“D”区分开来。
图像质量的下降如图2中左下角的图像所示。产生不适合图像处理的图像,特别是在2.5毫秒曝光时间下的¼" CCD。
对于这个例子,假设不需要大景深,所以镜头的最小f数是可以接受的,这意味着不可能通过打开镜头的快门来收集更多的光。
设计师必须考虑一种不同的相机。问题是不同的摄像头是否能提高系统的性能。½“传感器可能是一个不错的选择,因为使用更大的传感器通常被认为是解决低光性能问题的好方法。
表2。来源:FLIR系统
| 相机 |
传感器 |
像素大小(μm) |
量子效率
(%) |
颞暗噪声
(e) |
饱和容量
(e) |
1/4 "照相机
(FL3-GE-03S1M-C) |
ICX618 |
5.6 |
70 |
11.73 |
14508年 |
1/2 "照相机
(BFLY-PGE-03S3M-C) |
ICX414 |
9.9 |
39 |
19.43 |
25949年 |
考虑到EMVA 1288的成像性能,相机可以是有用的,而不是继续试验和错误。在分析EMVA 1288数据时,可以看到1 / 4”传感器噪音更低,量子效率更好,但1 / 2”CCD具有更大的饱和容量和像素。
本文将解释如何确定½“相机是否会表现得更好。通过绘制信号值与光密度(光子/ μ m)的关系图2)图3可以比较摄像机。信号作为光密度的函数,利用以下公式建立:
信号=光密度x(像素大小)2x量子效率
本文提出的一个关键假设是,镜头具有相同的f值、相同的视场和相同的相机设置。
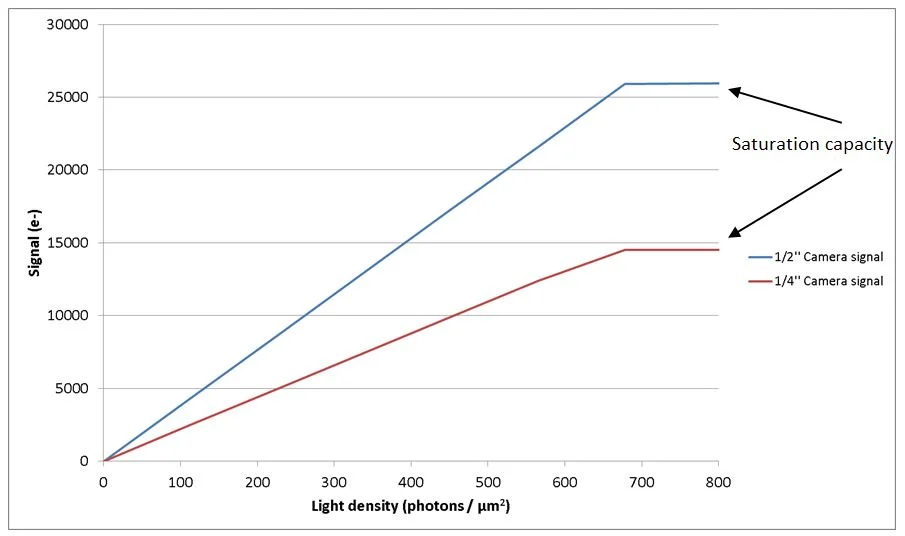
图3。1/4 "和1/2 " CCD相机产生的信号作为光电平的函数。图片来源:FLIR系统
图中显示,在相同的光密度下,½”传感器将产生更高的信号。也可以看到,饱和发生在700光子/µm的类似光密度水平2,但½”传感器的饱和容量要高得多。
在本例中考虑的应用程序中,摄像机的比较必须在低光电平下进行,这意味着考虑噪声电平变得特别重要。
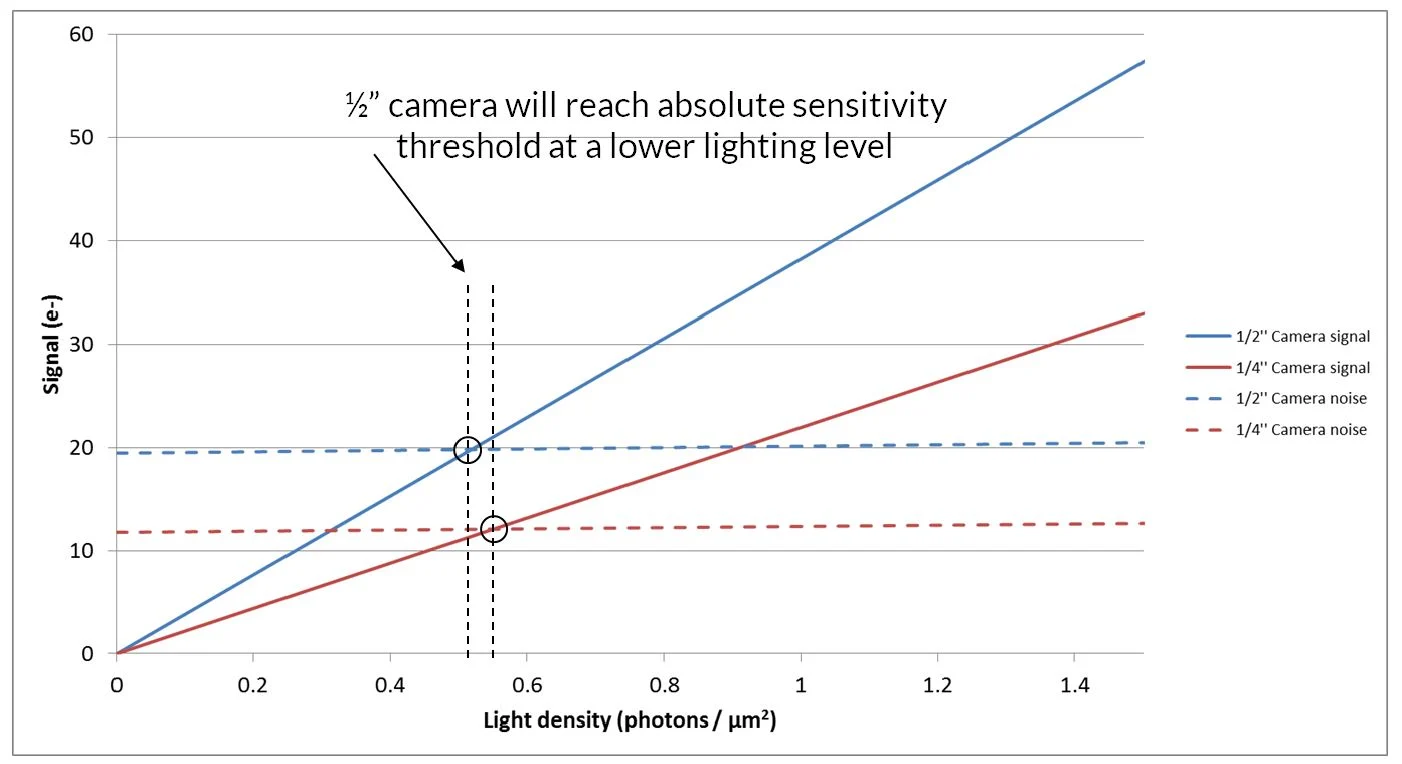
图4。1/4 "和1/2 " CCD相机在微光下的信号和噪声。图片来源:FLIR系统
图4显示了低照度下的噪音和信号。图中噪声为Temporal Dark noise和Shot noise的RMS求和,计算公式如下:

从图中可以看出,当信号与噪声相等时,即所谓的绝对灵敏度阈值,½”传感器所达到的亮度略低于¼”传感器。信噪比(SNR)是确定哪种相机在微光应用中表现更好的重要指标。
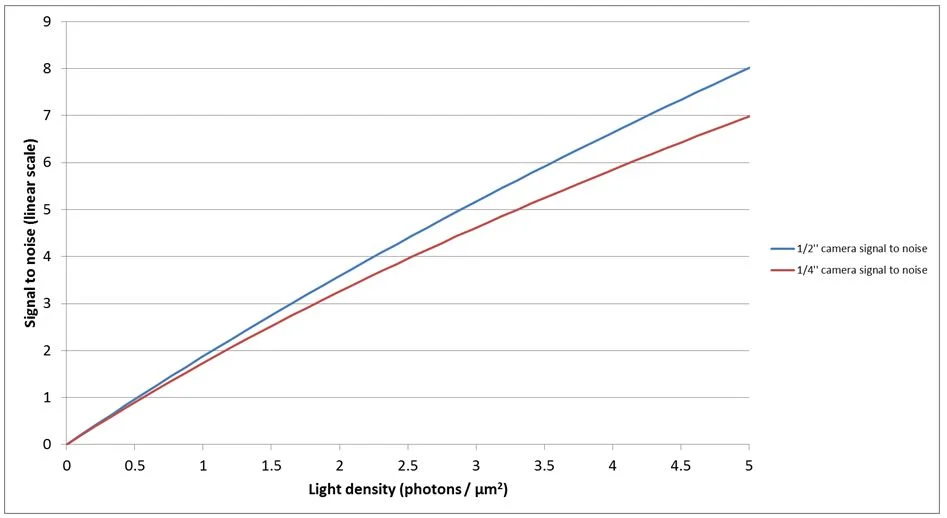
图5。1/4”和1/2”CCD相机在微光下的信噪比。图片来源:FLIR系统
两个摄像机的信噪比与照明等级的关系如图5所示。基于½”传感器较高的信噪比,该理论认为,½”相机在低亮度下的表现应该比¼”相机更好。
从图2的图像中可以看出,在2.5 ms曝光时间下,½”传感器在所有曝光时间内都能保持字符的形状,而¼”传感器则很难区分字符。因此,½”传感器的性能更好,实际结果与理论一致。
FLIR对摄像机进行了广泛的研究,并发表了EMVA 1288成像性能结果。这些信息对于比较不同型号相机的性能很有用。
这项研究在比较任何两个带有传感器的摄像机时通常是有用的,尽管摄像机的实现确实会影响成像性能。
我们应该考虑到,本文中概述的技术对于大致了解一台相机与另一台相机的性能有多好是有用的。这种技术可以帮助排除那些不太可能提高所需性能的相机,但相机性能的最终测试是在实际应用中。
传统CCD与现代CMOS传感器的比较
将传统CCD传感器的性能与现代CCD传感器进行比较CMOS传感器在一个场景与广泛的照明条件和低光成像条件。
之前的研究表明,搭载索尼ICX414(1 / 2”VGA CCD)的相机在弱光环境下的工作性能比搭载索尼ICX618(1 / 4”VGA CCD)的相机更好。接下来,½”VGA CCD将与新的索尼Pregius IMX249, 1/1.2”2.3Mpix全球快门CMOS传感器进行比较。
带有这两种传感器的相机的成本相当,大约为400欧元,CMOS相机的VGA区域实际上更接近¼”相机的光学尺寸,VGA分辨率的帧率也相似。
相机的EMVA 1288数据表明IMX249 CMOS传感器具有更低的噪声、更好的量子效率和更高的饱和容量,而ICX414 CCD传感器具有更大的像素,这是关键参数。
表3。来源:FLIR系统
| 相机 |
传感器 |
像素大小(μm) |
量子效率
(%) |
颞暗噪声
(e) |
饱和容量
(e) |
1/2 " CCD相机
(BFLY-PGE-03S3M-C) |
ICX414 |
9.9 |
39 |
19.43 |
25949年 |
1/1.2“CMOS摄像头
(BFLY-PGE-23S6M-C) |
IMX249 |
5.86 |
80 |
7.11 |
33105年 |
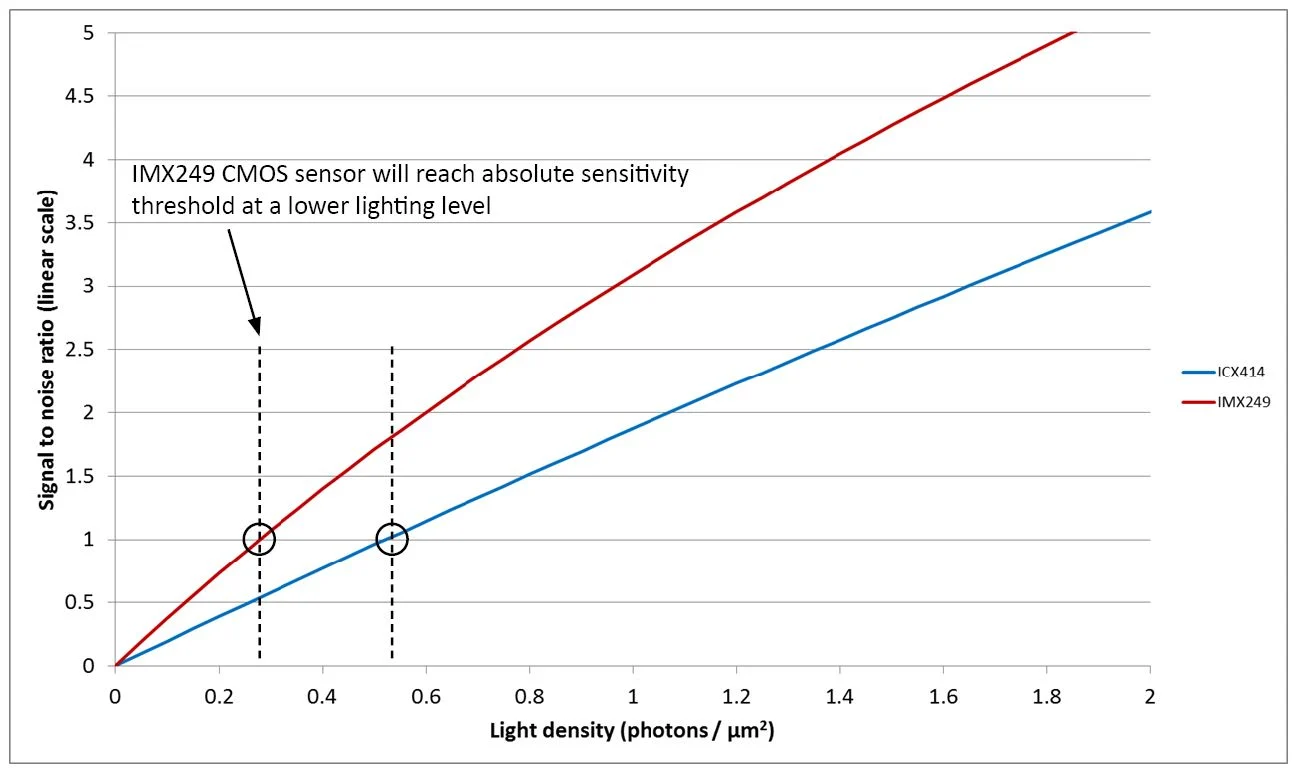
图6。ICX414 CCD和IMX249 CMOS传感器在低光下的信噪比。图片来源:FLIR系统
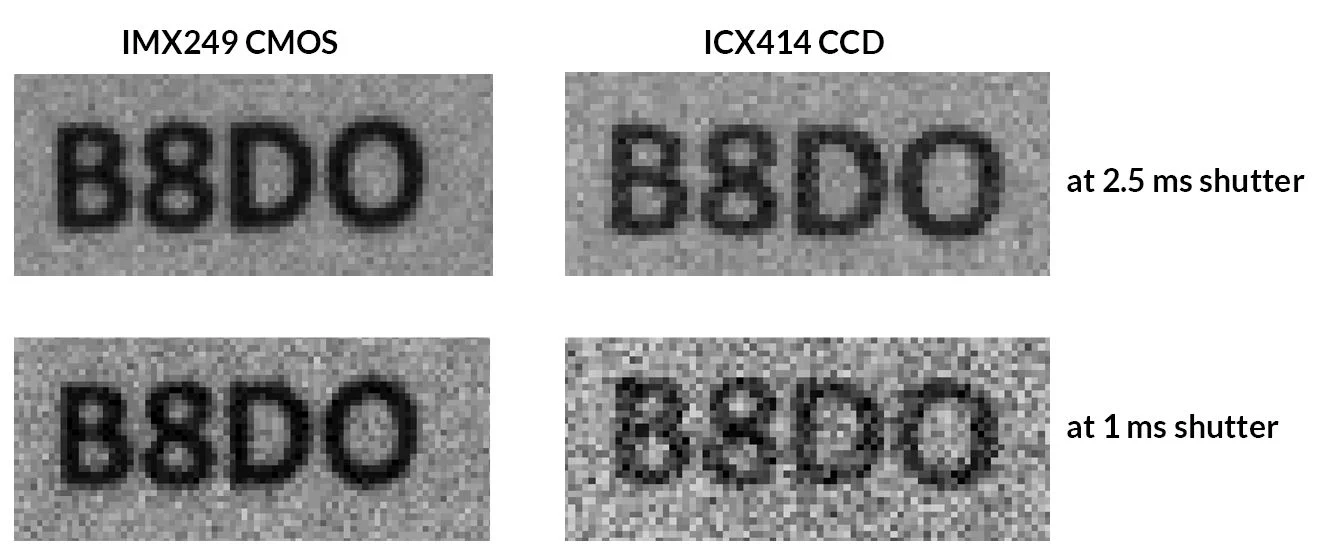
图7。ICX414 CCD和IMX249 CMOS传感器在不同曝光时间下的结果。图片来源:FLIR系统
第一个结论是,ICX414 CCD传感器生成的图像将比IMX249 CMOS传感器生成的图像更亮。如果从图中看不出这一点,那么值得考虑的是,图像将在700光子/µm左右产生2.
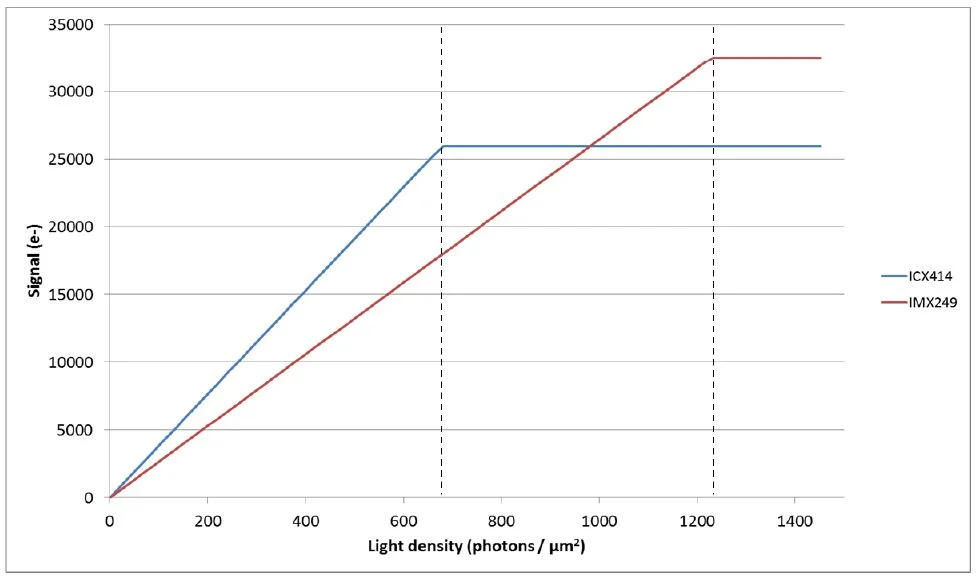
图8。由ICX414 CCD和IMX249 CMOS传感器产生的信号作为光电平的函数。图片来源:FLIR系统
图像应该是最高的灰度级,最有可能是饱和的ICX414 CCD传感器,而IMX249 CMOS传感器将产生的图像是刚刚超过50%的最大亮度。
naïve的方法是通过观察图像的亮度来评估相机的灵敏度,因此这种观察是非常重要的。假设性能更好的相机会产生更亮的图像。
然而,这是不正确的,它实际上是相反的,在这个例子中,相机产生更暗的图像实际上有更好的性能。第二个观察结果是IMX249 CMOS传感器产生的图像将在更大范围的光照条件下用于图像处理。
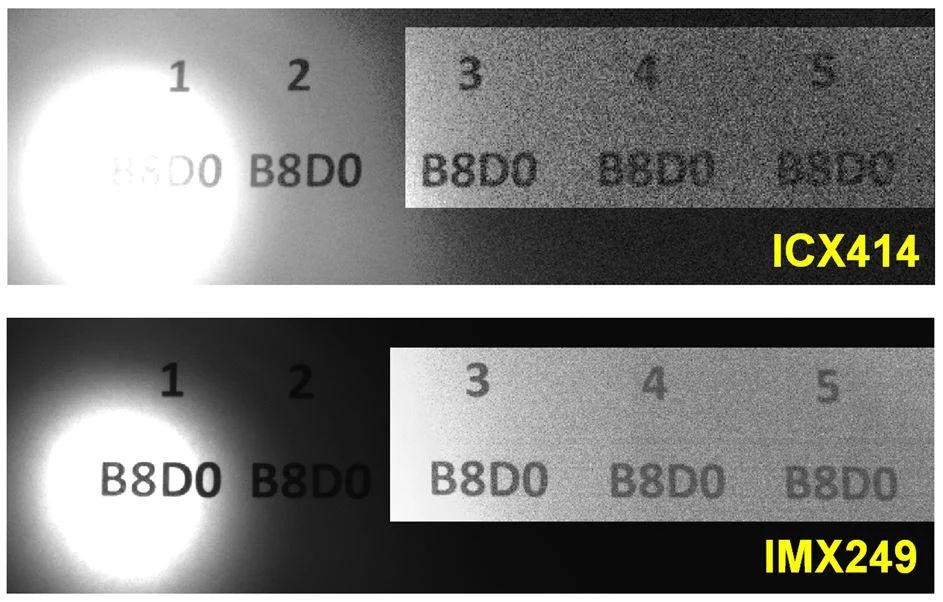
图9。ICX414 CCD和IMX249 CMOS传感器在困难的照明条件下获得的结果。图片来源:FLIR系统
图9显示了两个摄像机拍摄的相同场景。底层数据没有被修改,但应该注意的是,为了显示的目的,图像的较暗部分被增强了。
从图像中可以看出,ICX414 CCD在场景的亮区是饱和的,而同时,在暗区有太多的噪声,字符不容易读懂。另一方面,IMX249 CMOS传感器在场景的亮部和暗部产生清晰的字符。
可以得出结论,在机器视觉应用中,最近的全球快门CMOS技术正在成为一个可行的替代ccd。
这些传感器在同等分辨率下有更高的帧率,价格更低,没有像涂抹和开花这样的伪影,而且它们的成像性能也开始超过ccd。
结论
在这篇文章中,在评估相机性能的关键概念被证明。的EMVA1288标准并将结果应用于不同光照条件下的相机性能比较。
在评估相机时,仍然有许多方面的相机性能可以考虑。例如,量子效率在不同的波长会发生巨大的变化,所以当光源在近红外(NIR)频率时,在525 nm波长下表现良好的相机可能表现不佳。
长曝光时间,这是常见的荧光和天文成像,必须考虑暗电流的影响,这是一种噪声,在极低的光水平是至关重要的。

这些信息已经从FLIR系统提供的材料中获得、审查和改编。亚博网站下载
有关此来源的更多信息,请访问FLIR系统。